
Research project
SAFE and SOUND: Towards Evidence-based Policies for Safe and Sound Robots
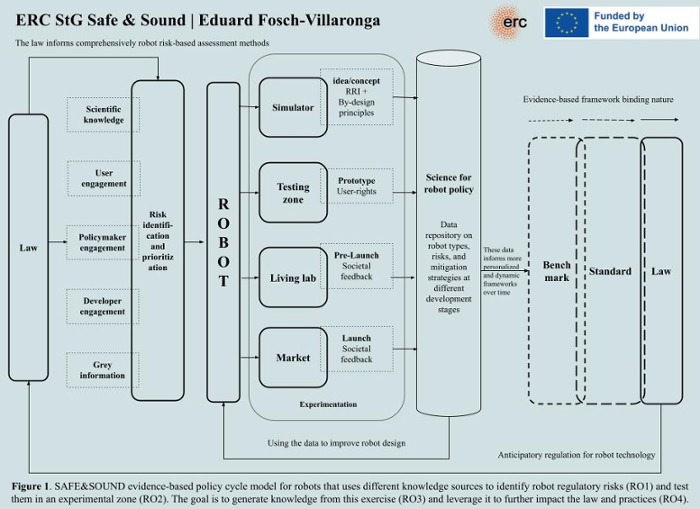
ERC StG SAFE and SOUND has the ambition to connect the policy cycle with data generated in robot testing zones to support evidence-based policymaking for robot technologies.
- Duration
- 2023 - 2028
- Contact
- Eduard Fosch Villaronga
- Funding
-
 European Union's Horizon-ERC program (Grant Agreement No. 101076929)
European Union's Horizon-ERC program (Grant Agreement No. 101076929)
- Partners
There is an increasing gap between the policy cycle's speed and technological change. This gap is very noticeable in healthcare robotics, where policies are scattered and cover the issues robots entailed unevenly. This disconnect results in robot developers failing to integrate essential legal considerations into their designs, user safety not always being ensured, and the development of systems that may cause harm to patients. While other sectors enjoy evidence-based policies that translate policy goals into practical guidance, these frameworks have yet to emerge for robotic technology.
Research objectives (RO)
SAFE and SOUND ushers in a new knowledge-policy relationship model for robots to facilitate the integration of legal requirements into the design of robotic technology in simulators, testing zones, and living labs, and reuse the data generated from this process for evidence-based policies on robots.
- RO1: Identify regulatory gaps for personal care robots
- RO2: Test uncovered legal challenges for personal care robots
- RO3: Leverage robot testing zones data to support evidence-based policy change
- RO4: Investigate science for robot policy conception, effectiveness and sustainability
To turn this conceptual model into practice, this project focuses on healthcare robots; in particular, on two specific case studies: lower-limb exoskeletons and socially assistive robots. The testing zones developed by H2020 EUROBENCH and ISO 13482:2014 on safety requirements for personal care robots are used for this project.
Methods
SAFE & SOUND's overarching methodology is anticipatory regulation, an emerging, proactive, iterative legal approach for empirically framing fast-evolving technological changes. This novel method is inclusive and collaborative, future-facing, proactively engages with innovation, has an iterative mindset and is outcomes-based. Moreover, it counts with decentralized experimentation to enable diverse responses to the regulation of early-stage opportunities and risks where national or global policies and standards are still to be established. SAFE & SOUND uses robot testbeds, open data, interaction between regulators and developers, and active patient engagement to support regulators' proactive, engaged role in the healthcare robot innovation process.
Scientific contribution
SAFE & SOUND advances research toward an evidence-based regulatory model for robots that guides rather than catches up with robot (r)evolution and is more attuned to societal needs and fundamental rights. SAFE & SOUND opens new avenues for using evidence-based mechanisms to regulate robots in the EU and serves as an example for such activities across the globe.
Team configuration
SAFE & SOUND will be composed by the following team members:
- Eduard Fosch-Villaronga. Principal investigator (PI) with an interdisciplinary background in law, science, and technology. Eduard will direct the project, investigate RO4, supervise the Ph.D. students and the postdoc in RO1, RO2 and RO3, synthesize results, and be the liaison with main stakeholders.
- 1 postdoc to help conduct the interviews planned with different stakeholders in RO1 and analyze grey information, help process data in RO2, build a mechanism to translate raw data into policy-relevant data in RO3 and help close the project in RO4.
- 2 Ph.D. students for 4 years to do their Ph.D. on evidence-based mechanisms for regulating physical assistant (Ph.D. 1) and socially assistive (Ph.D. 2) robots – mainly RO1 and RO2.
Background reading
You can read more about the foundations on which this project is based by reading the following articles:
- Fosch-Villaronga, E. and Heldeweg, M. A., (2018) "Regulation, I Presume?" Said the Robot. Towards an Iterative Regulatory Process for Robot Governance. Computer Law and Security Review, 34(6), 1258-1277.
- Calleja, C., Drukarch, H., and Fosch-Villaronga, E. (2022). Harnessing robot experimentation to optimize the regulatory framing of emerging robot technologies. Data & Policy, Cambridge University Press, 1-15.
- Fosch-Villaronga, E., & Drukarch, H (2023) Accounting for diversity in robot design, testbeds, and safety standardization. International Journal of Social Robotics,1-19.
- Drukarch, H., Calleja, C., and Fosch-Villaronga, E. (2023). An iterative regulatory process for robot governance. Data & Policy, Cambridge University Press, 5:e8, 1-22.
- Fosch-Villaronga, E., Drukarch, H., Giraudo, M. (2023). A legal sustainability approach to align the order of rules and actions in the context of digital innovation. In: Sætra, H. (2023) Technology and Sustainable Development. The Promise and Pitfalls of Techno-Solutionism. Routledge, 127-143.
- Check the results of the H2020 Eurobench FSTP PROPELLING at this link.
Safe and Sound is a project that has received funding from the European Union's Horizon-ERC program, Grant Agreement No. 101076929.