

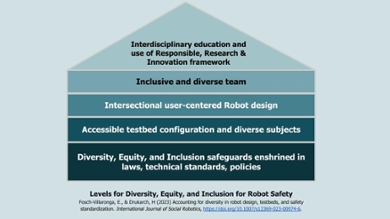
Accounting for diversity in robot design, testbeds, and safety standardisation
image: Jordan McDonald
Eduard Fosch-Villaronga from eLaw - Center for Law and Digital Technologies, and Hadassah Drukarch, explored the role of intersectionality within (rehabilitation) robot design, testbed, and standards. Being oblivious to these considerations may give way to the development of robots that fall short of fitting everyone or underperform and compromise the safety of those whose features are disregarded.
Robots in medical care and rehabilitation are becoming increasingly prevalent. They promise to meet patients' needs by personalising physical and social interactions with users. However, tailoring robots to users is about more than just making the robot adjustable or personalised to the users' tastes. It is also about ensuring design justice (i.e. a design theory that rethinks design processes, places marginalised groups at the centre of the design process, and exploits collaborative, creative practices to overcome exclusion challenges) and understanding how inclusive robot design is to interact with the user in a natural, non-discriminatory way.
Following an extensive literature review and two weeks of experimentation within a robotic testbed developed under the H2020 EUROBENCH project for lower-limb exoskeletons in Los Madroños Hospital in Madrid (Spain), Eduard Fosch-Villaronga from eLaw and Hadassah Drukarch realised that many diversity considerations, including gender, health condition, age, and body complexity, are safety-critical and their disregard in robot designs, robot testing zones, and standards can cause harm to users. They published their observations in the prestigious International Journal of Social Robotics.
While research often calls out developers and designers for failing to account for diversity, in this article, they focused on how and to what extent existing lower limb exoskeletons, robot testbeds, regulations and standards account for users coming in different sizes, shapes, and medical conditions. More specifically, they focused on ISO 13482:2014 on Personal Care Robots, the leading standard setting out safety requirements for personal care robots (i.e. service robots increasing the standard of living of humans, excluding medical or industrial applications).
Departing from their experiments and observations conducted under the H2020 EUROBENCH Financial Support to Third Parties (FSTP) PROPELLING project, the researchers argue that the standard insufficiently accounts for differences between users, potentially compromising the safety of subjects whose features remain ignored.
Want to know more? Read the article in open-access following this link.
This project contributes to advancing the knowledge in the field of Science for Robot Policy, which Dr Eduard Fosch-Villaronga started at the eLaw Center for Law and Digital Technologies some time ago. Within that topic, Eduard received an ERC Starting Grant to work on SAFE & SOUND, a project he created that has the ambition to ideate practical ways to link robot experimental settings with the policy cycle to help overcome such information asymmetries between developers, users, and policymakers; give voice to end-users; and shed light on what needs regulatory attention for adequate robot governance.